Quando alguém se desloca de uma posição para outra, não basta dizer que percorreu, por exemplo, 50m. Para que a ideia fique completa, há necessidade de se especificar além do módulo (50) e da unidade de comprimento (m) também a direção e o sentido em que o deslocamento se realizou.
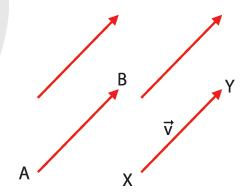
Quando um corpo sofre um deslocamento de uma posição A para uma posição B, essa mudança de posição é definida pelo segmento orientado AB, que une a posição inicial A à posição final B, como mostra a figura a seguir:

As grandezas que, para ficarem completamente caracterizadas, necessitam que especifiquemos módulo, direção e sentido são chamadas grandezas vetoriais (velocidade, aceleração, força etc.). Para representá-las usamos um ente matemático chamado vetor.
CONCEITO E NOTAÇÃO
Dois segmentos orientados que têm módulos, direções e sentidos iguais são chamados equipolentes. Ao conjunto dos infinitos segmentos equipolentes a um dado segmento orientado AB chamamos vetor AB e representamos por AB, como ilustrado na figura:
ORIENTAÇÃO
A orientação de uma grandeza consiste na indicação de sua direção e seu sentido. Para que você não confunda direção e sentido, observe o exemplo abaixo.

As retas r e s são paralelas indicando então que elas têm a mesma direção (direção horizontal). Observe que os sentidos são indicados sobre a direção (direita ou esquerda) indicando então que r e s têm sentidos opostos.
REPRESENTANÇÃO
O vetor reúne três características: módulo, direção e sentido. A grandeza vetorial será representada geometricamente por um vetor. O vetor é um segmento de reta orientado (direção e sentido). A orientação de tal segmento será a mesma orientação da grandeza que ele representa e a sua dimensão será proporcional ao módulo da grandeza vetorial.
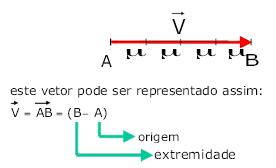
O módulo deste vetor pode ser representado, assim:
![]()
ADIÇÃO DE VETORES
Para somar vetores, podemos utilizar dois métodos: o método do paralelogramo (para a soma de dois vetores) e o método polígono (para a soma de vários vetores).
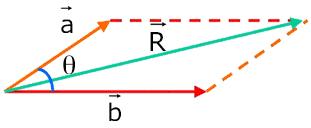
Método do Paralelogramo
Vamos somar as grandezas vetoriais  e
e  , usando o método do paralelogramo.
, usando o método do paralelogramo.
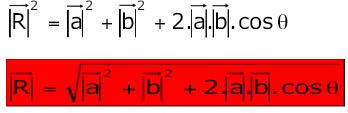
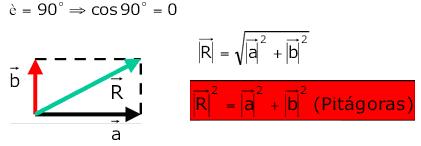
Observe que o vetor resultante terá seu módulo determinado pela lei dos co-senos.

Método do Polígono
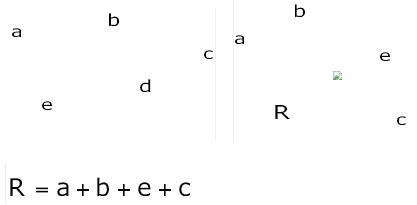
O método do polígono é usado para somar mais de dois vetores. O método consiste em ligar a extremidade do primeiro vetor na origem do segundo a extremidade do segundo na origem do terceiro e este procedimento segue até o último vetor. O vetor resultante é um vetor que deverá ser construído por nós, ligando a origem do primeiro com a extremidade do último vetor. Veja o exemplo a seguir.
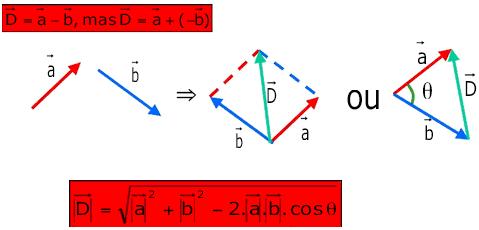
DIFERENÇA DE VETORES
A diferença entre dois vetores (a e b), é na verdade a soma do vetor a com o oposto do vetor b.
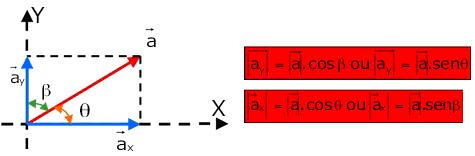
COMPONENTES PERPENDICULARES DE UM VETOR
As componentes perpendiculares de um vetor, são projeções deste vetor em duas direções perpendiculares não coincidentes com a direção dele.
VERSOR
O versor é um vetor unitário (módulo 1) que nós usamos para indicar direção e sentido.
Recapitulando: